SeaTRAK
SeaTRAK provides a cost-effective solution for oceanographic coastal survey applications and vehicle navigation.
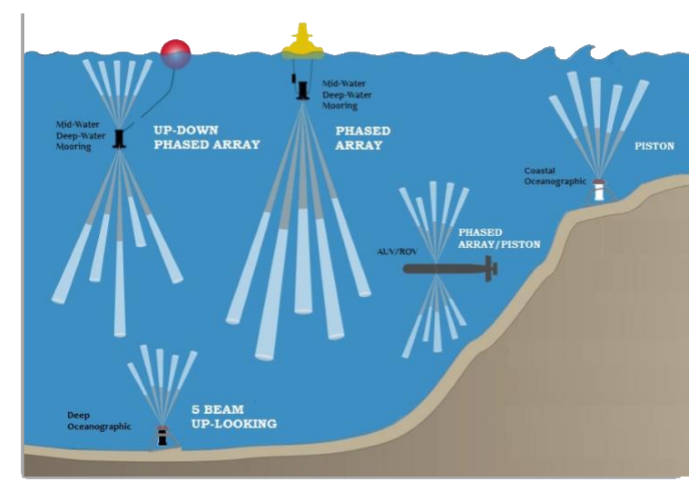
The SeaTRAK vessel-mounted and powered Acoustic Doppler Current Profiler (ADCP) provides precise bottom-referenced velocity and current profile measurements, operating at frequencies of 300, 600, and 1200 kHz.
Water Profile ranges from 0.08m to 150m
Bottom Track ranges from 0.3m to 300m
Key Features:
The Rowe Technologies SeaTRAK HF (High Frequency) family of Vessel-Mounted ADCP’s represent the industry’s state of the art in acoustic Doppler technology. The compact form factor and powerful electronics provide a versatile platform capable of producing precise bottom-referenced velocity, current profile measurements, and echo intensity measurement. SeaTRAK HF is available in three frequencies: 300 kHz, 600 kHz, and 1200 kHz.
Each unit in the family uses a common core set of electronics in a flexible form factor. With a removable hull mounting adapter ring, and a versatile power and communications interface box, SeaTRAK HF provides a cost-effective, extremely capable instrument to address a wide variety of oceanographic coastal survey applications and vehicle navigation. SeaTRAK HF can be fitted directly to the hull, used in a moon pool or temporarily mission-deployed over the side.
SeaTRAK’s user-selectable signal processing functions provide excellent temporal, spatial, and velocity resolution and precision. User-programmability features provide capability that is particularly useful in variable depths and near shore applications. Multi-modes such as Broadband, Narrowband, Pulse Coherent, and Vessel Tracking provide many different field collection options. The ability to interleave up to 12 independent missions allows simultaneous collection of long range and high resolution data in a single data file. GPS position, speed and heading information can be directly integrated into the data field to ensure lifetime data integrity.
The SeaTRAK HF ADCP’s are well-suited for a variety of coastal and continental shelf oceanographic applications such as current surveys, plume tracking, renewable energy site surveys, coastal engineering and port/harbor verification studies. Rowe systems are easily integrated into the shipboard environment for long-term vessel operations.
Each unit in the family uses a common core set of electronics in a flexible form factor. With a removable hull mounting adapter ring, and a versatile power and communications interface box, SeaTRAK HF provides a cost-effective, extremely capable instrument to address a wide variety of oceanographic coastal survey applications and vehicle navigation. SeaTRAK HF can be fitted directly to the hull, used in a moon pool or temporarily mission-deployed over the side.
SeaTRAK’s user-selectable signal processing functions provide excellent temporal, spatial, and velocity resolution and precision. User-programmability features provide capability that is particularly useful in variable depths and near shore applications. Multi-modes such as Broadband, Narrowband, Pulse Coherent, and Vessel Tracking provide many different field collection options. The ability to interleave up to 12 independent missions allows simultaneous collection of long range and high resolution data in a single data file. GPS position, speed and heading information can be directly integrated into the data field to ensure lifetime data integrity.
The SeaTRAK HF ADCP’s are well-suited for a variety of coastal and continental shelf oceanographic applications such as current surveys, plume tracking, renewable energy site surveys, coastal engineering and port/harbor verification studies. Rowe systems are easily integrated into the shipboard environment for long-term vessel operations.
|
300kHz 3" Beams |
600kHz 3" Beams |
600kHz 2" Beams |
600kHz 1" Beams |
1200kHz 2" Beams |
|
|---|---|---|---|---|---|
| Water Profile: | |||||
| Broadband |
100 m @ 4m Bin Size |
50 m @ 2m Bin Size |
45 m @ 2m Bin Size |
40 m @ 2m Bin Size |
20 m @ 1m Bin Size |
| Narrowband |
150 m @ 4m Bin Size |
75 m @ 2m Bin Size |
70 m @ 2m Bin Size |
50 m @ 2m Bin Size |
30 m @ 1m Bin Size |
| Minimum Blanking Distance | 32.0 cm | 16.0 cm | 16.0 cm | 16.0 cm | 8.0 cm |
| Minimum Bin Size | 2.8 cm | 1.4 cm | 1.4 cm | 1.4 cm | 0.7 cm |
| Maximum Number of Bins | 200 bins | 200 bins | 200 bins | 200 bins | 200 bins |
| Velocity Resolution | 0.01 cm/s | 0.01 cm/s | 0.01 cm/s | 0.01 cm/s | 0.01 cm/s |
| Long-Term Accuracy |
± 0.25% ± 2 mm/s |
± 0.25% ± 2 mm/s |
± 0.25% ± 2 mm/s |
± 0.50% ± 1.5 mm/s |
± 0.25% ± 2 mm/s |
| BB Single Ping Precision |
3.5 cm/s @ 4m bin size |
3.5 cm/s @ 2m bin size |
3.5 cm/s @ 2m bin size |
3.5 cm/s @ 2m bin size |
3.5 cm/s @ 1m bin size |
| NB Single Ping Precision |
20.0 cm/s @ 4m bin size |
20.0 cm/s @ 2m bin size |
20.0 cm/s @ 2m bin size |
20.0 cm/s @ 2m bin size |
20.0 cm/s @ 1m bin size |
| Velocity Range | ±5.0 m/s (Default); ±20.0 m/s (Maximum) | ±5.0 m/s (Default); ±20.0 m/s (Maximum) | ±5.0 m/s (Default); ±20.0 m/s (Maximum) | ±10.0 m/s (Default); ±20.0 m/s (Maximum) | ±5.0 m/s (Default); ±20.0 m/s (Maximum) |
| Amplitude Dynamic Range | 100 dB | 100 dB | 100 dB | 100 dB | 100 dB |
| Amplitude Presicion | 0.001 dB | 0.001 dB | 0.001 dB | 0.001 dB | 0.001 dB |
| Bottom Track: | |||||
| Minimum Altitude | 0.5 m | 0.3 m | 0.3 m | 0.3 m | 0.3 m |
| Maximum Altitude | 300 m | 130 m | 120 m | 70 m | 50m |
| Long-Term Accuracy |
± 0.70% ± 2 mm/s |
± 0.25% ± 2 mm/s |
± 0.50% ± 2 mm/s |
± 0.50% ± 1.5 mm/s |
± 0.25% ± 2 mm/s |
| Single Ping Precision |
0.6 cm/s @ 3 m/s |
0.5 cm/s @ 3 m/s |
0.5 cm/s @ 3 m/s |
1.5 cm/s @ 1.0 m/s |
0.4 cm/s @ 3 m/s |
| Data: | |||||
| Communcations | [RS-232 & RS-485], [RS-422], [Ethernet (UDP)] | ||||
| Ping Rate | Up to 10 hz | Up to 10 hz | Up to 10 hz | Up to 10 hz | Up to 10 hz |
| Internal Recording | 32 GB Micro SD Card | ||||
| Data Formats | RTB, RTD, PD0, PD3, PD4, PD5, PD6, PD13, MATLAB, CSV, Python | ||||
| Sensors: | |||||
| Compass | Range: 0°-360°, Accuracy: 1° RMS, Resolution: 0.01° | ||||
| Pitch/Roll | Range: Roll ±180° | Pitch ±90°, Accuracy: < 1° RMS, Resolution: 0.01° | ||||
| Water Temp | Range: -5° - 70°C, Accuracy: ±0.15°C | ||||
| Pressure | Range: Selectable, Accuracy: ±0.1% Range | ||||
| System: | |||||
| Transducer Size | 3 in | 3 in | 2 in | 1 in | 2 in |
| Configurations | 4-Beam, 5-Beam, 7-Beam, 8-Beam | ||||
| Beam Width | 2.80° | 1.42° | 2.16° | 3.50° | 1.01° |
| Beam Angle | 20° | 20° | 20° | 20° | 20° |
| Voltage Range | 12 - 36 Volt DC | ||||
| Average Power | 23 W | 30 W | 30 W | 30 W | 23 W |
| Temperature | -5° to 45° C (Operating), -30° to 60° C (Storage) | ||||
| Depth Rating | 300m, 3000m, 4000m, 6000m | ||||
| Material Options | Acetal(Plastic), Aluminum, Titanium | ||||
| Specifications may be subject to change at any time in the future | |||||


| 0 MB | seatrak-hf.pdf |
| 3 MB | RTI ADCP DVL USER GUIDE Rev AN.pdf |
| 0 MB | RTI Quick Start Guide - Rev C.pdf |
| 5 MB | RTI.Firmware.Updater.Installer.v.3.0.0.Full.exe |
| 0 MB | RTI.Firmware_0_2_143_Release.zip |
Note: Click on the heading text to expand or collapse panels to read the abtracts.
Currently the inspection of industrial underwater structures is performed by remotely operated
vehicles or by divers. Since the number of underwater structures keeps growing, e.g. due to new
oil and gas fields or offshore wind farms, the need for a constantly available method to
inspect these structures arises. The FlatFish project is an initiative of BG Group Brazil and
the Brazilian Institute of Robotics in Salvador and aims at developing a subsea-resident AUV
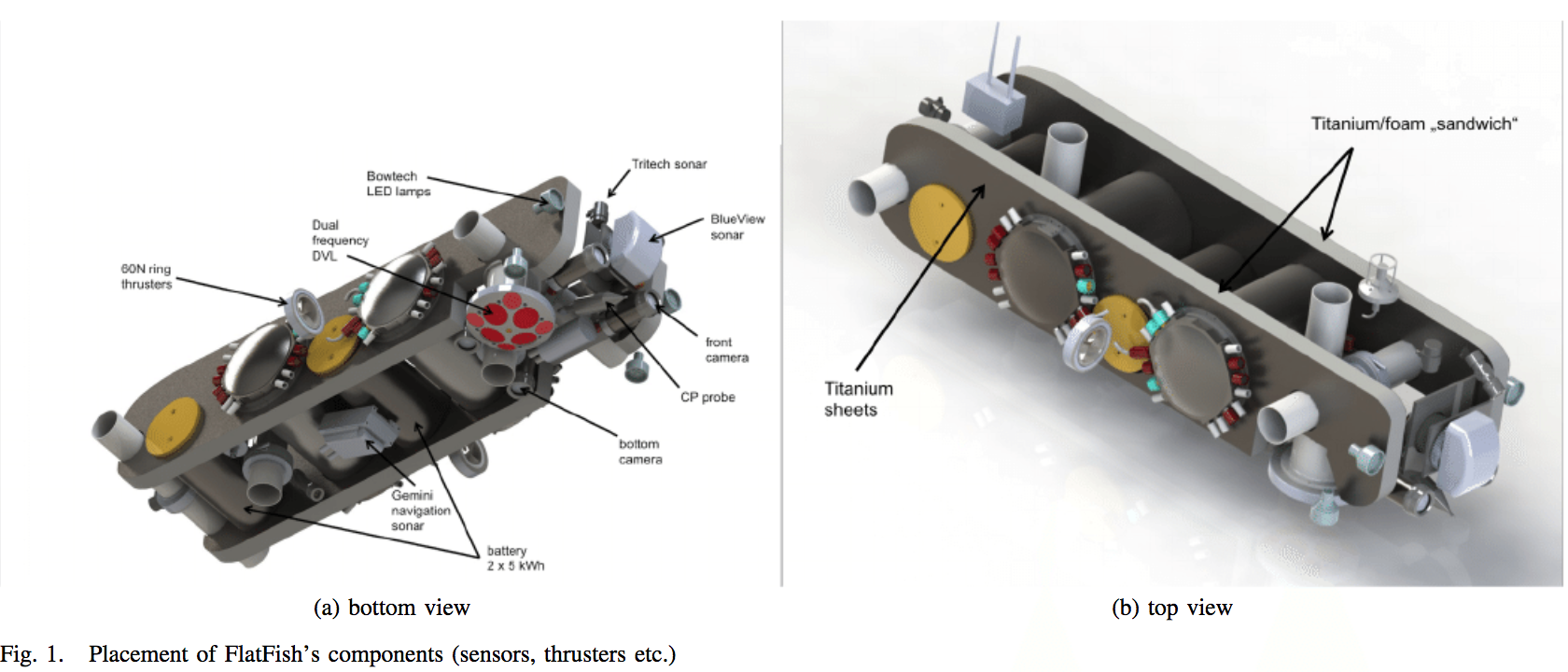
which can inspect the infrastructure at an oil and gas site on demand. FlatFish is a compact
AUV, designed to acquire a high-resolution, textured 3D model of an underwater structure within
an oil and gas asset. FlatFish is very agile and can hover during inspection, it uses a novel
kind of navigation system to safely reach its goal within the field and is designed to stay
submerged for extended periods of time. Within this paper the system design of FlatFish is
presented.
DOI: 10.23919/OCEANS.2015.7404442
Learn more
DOI: 10.23919/OCEANS.2015.7404442
Learn more
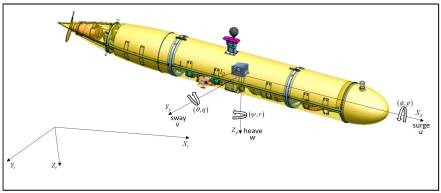
This paper presents a manifold based Unscented Kalman Filter that applies a novel strategy for
inertial, model-aiding and Acoustic Doppler Current Profiler (ADCP) measurement incorporation.
The filter is capable of observing and utilizing the Earth rotation for heading estimation with
a tactical grade IMU, and utilizes information from the vehicle model during DVL drop outs. The
drag and thrust model-aiding accounts for the correlated nature of vehicle model parameter
error by applying them as states in the filter. ADCP-aiding provides further information for
the model-aiding in the case of DVL bottom-lock loss. Additionally this work was implemented
using the MTK and ROCK framework in C++, and is capable of running in real-time on computing
available on the FlatFish AUV. The IMU biases are estimated in a fully coupled approach in the
navigation filter. Heading convergence is shown on a real-world data set. Further experiments
show that the filter is capable of consistent positioning, and data denial validates the method
for DVL dropouts due to very low or high altitude scenarios.
arXiv:1805.08011v1 [cs.RO] 21 May 2018
Learn more
![The FlatFish AUV [2] during sea trails. Image: Jan Albiez, SENAI CIMATEC](https://www.researchgate.net/profile/Lashika_Medagoda/publication/325283263/figure/fig1/AS:628931313029120@1526960318909/The-FlatFish-AUV-2-during-sea-trails-Image-Jan-Albiez-SENAI-CIMATEC.png)
arXiv:1805.08011v1 [cs.RO] 21 May 2018
Learn more
Water current velocities are a crucial component of understanding
oceanographic processes and underwater robots,
such as autonomous underwater vehicles (AUVs), provide
a mobile platform for obtaining these observations. Additionally,
a real-time estimate of the water-current velocity
environment will aid the control and planning of the AUV,
and localizing within a predicted water-current vector field is
an area of continuing research [1]. Estimating water current
velocities requires both measurements of the water velocity,
often obtained with an Acoustic Doppler Current Profiler
(ADCP), as well as estimates of the vehicle velocity.
ICRA 2016 Workshop on Marine Robot Localization and Navigation
Learn more
ICRA 2016 Workshop on Marine Robot Localization and Navigation
Learn more
The Technion autonomous underwater vehicle (TAUV) is an ongoing project aiming to develop and
produce a small AUV to carry on research missions, including payload dropping, and to
demonstrate acoustic communication. Its navigation system is based on an inertial navigation
system (INS) aided by a Doppler velocity log (DVL), magnetometer, and pressure sensor (PS). In
many INSs, such as the one used in TAUV, only the velocity vector (provided by the DVL) can be
used for aiding the INS, i.e., enabling only a loosely coupled integration approach. In cases
of partial DVL measurements, such as failure to maintain bottom lock, the DVL cannot estimate
the vehicle velocity. Thus, in partial DVL situations no velocity data can be integrated into
the TAUV INS, and as a result its navigation solution will drift in time. To circumvent that
problem, we propose a DVL-based vehicle velocity solution using the measured partial raw data
of the DVL and additional information, thereby deriving an extended loosely coupled (ELC)
approach. The implementation of the ELC approach requires only software modification. In
addition, we present the TAUV six degrees of freedom (6DOF) simulation that includes all
functional subsystems. Using this simulation, the proposed approach is evaluated and the
benefit of using it is shown.
Sensors (Basel). 2017 Feb; 17(2): 415.
Learn more

Sensors (Basel). 2017 Feb; 17(2): 415.
Learn more

This work proposes a localization method using a mechanically scanned imaging
sonar (MSIS), which stands out by its low cost and weight. The proposed method
implements a Particle Filter, a Bayesian Estimator, and introduces a measurement
model based on sonar simulation theory. To the best of author’s knowledge, there is
no similar approach in the literature, as sonar simulation current methods target in
syntethic data generation, mostly for object recognition . This stands as the major
contribution of the thesis as allows the introduction of the computation of intensity
values provided by imaging sonars, while maitaining compability with the already
used methods, such as range extraction.
Simulations shows the efficiency of the method as well its viability to the utilization
of imaging sonar in underwater localization. The new approach make possible,
under certain constraints, the extraction of 3D information from a sensor considered,
in the literature, as 2D and also in situations where there is no reference at the same
horizontal plane of the sensor transducer scanning axis. The localization in complex
3D environment is also an advantage provided by the proposed method.
Rio de Janeiro: UFRJ/COPPE, 2017.
Learn more
Rio de Janeiro: UFRJ/COPPE, 2017.
Learn more
Cochin Port is a major port in the Arabian Sea – Indian Ocean Sea – route and is one of the
largest ports in India. The commercial port of Cochin in South-East India is situated in a
natural bay connected to Kerala’s backwaters. It has the largest siltation rate among Indian
ports: more than 20 million m³ per year. Siltation is pollution of water by fine particulate
terrestrial clastic material. Siltation occurs mostly during the Monsoon (June-September) when
both river discharges and ocean dynamics are high.
The need for continuous maintenance dredging has serious budgetary impacts for the Cochin Port Trust (COPT). Therefore Cochin Port Trust assigned Antea Group, IIC technologies and Stema Systems to collaborate on a study for the analysis of the siltation processes and to assess the feasibility to implement the nautical depth concept. The latter signifies to investigate the nature of the fluid mud seabed and determine to what extent vessels can sail through and manoeuvre in it.
Wodcon XXI Proceedings 2016.
Learn more
The need for continuous maintenance dredging has serious budgetary impacts for the Cochin Port Trust (COPT). Therefore Cochin Port Trust assigned Antea Group, IIC technologies and Stema Systems to collaborate on a study for the analysis of the siltation processes and to assess the feasibility to implement the nautical depth concept. The latter signifies to investigate the nature of the fluid mud seabed and determine to what extent vessels can sail through and manoeuvre in it.
Wodcon XXI Proceedings 2016.
Learn more
The port of Cochin has the largest siltation rate among Indian ports: +20 million m³/year.
Local dynamics
are controlled by the two rivers discharging into the port system and the ocean. Siltation
occurs mostly during the
Monsoon (June-September) when dynamics are high (Naik et al., 1983).
The Cochin Port Trust (COPT) has tried to optimize the dredging efforts, i.e. allowing ships to
partially penetrate the
fluid mud. This project is a comprehensive attempt to tackle this problem by understanding the
siltation processes in
detail and by determining a minimum water depth, draft and under-keel-clearance at which
navigation of ships through
fluid mud is “safe” (nautical depth).
The project was structured in different stages:
1. Desktop study to understand the existing situation and to determine the required acquisition
efforts for the
development of a numerical 2D model (TELEMAC6
).
2. Data acquisition and fieldwork to gather the key variables to set up and calibrate the
numerical model and
undertake the navigation studies.
3. Numerical modeling to understand in detail the siltation processes that occur in the area by
simulating the
hydrodynamics conditions (waves, tides and currents) as well as sediment transport, erosion and
siltation
processes. After calibration and validation, the model was used for scenario analysis.
4. Navigation studies to determine a nautical depth. Firstly, the navigation conditions were
modeled physically
by replicating (1) natural conditions under laboratory environment, (2) selecting a number of
maneuvers with
chosen design ships with different under keel clearance (UKC) levels and (3) determining mud
rheology at
the towing tank from the Flanders Hydraulics Research (FHR). Secondly, the results obtained in
the physical
model were compared against the expert judgement of pilots from the Port of Cochin. For this,
tests in the 3D
navigation simulator from the FHR, replicating Cochin’s hydrodynamic and environmental
conditions, were
developed.
For this project, the nautical depth criterion was defined with a conservative mindset, by
assessing “safe navigation”
in terms of maneuverability of vessels. Recommendations to support the implementation of this
criterion were provided
to the client.
The combination of all achieved results allowed the COPT to optimize their maintenance dredging
strategy, while
keeping sufficient nautical depth. In order to reach greater economic success, the nautical
depth criterion needs to be
fine-tuned in future works.
CEDA Dredging Days 2017, At Rotterdam
Learn more
CEDA Dredging Days 2017, At Rotterdam
Learn more
The North Carolina State University’s Department of Marine, Earth, and Atmospheric Sciences
and Center for Marine Science and Technology recently acquired a SeaRobotics MiniCat
Unmanned Surface Vehicle (USV). The USV is designed to operate in shallow water, coastal,
harbor, riverine, and lake environments. The USV can operate with two different instrument
configurations. 1) A seabed-mapping package with an Edgetech 6205 bathymetric and
side-scanning sonar with integrated sub-bottom profiler, or 2) a watercolumn mapping
package with a Rowe 1200Khz Seaprofiler Acoustic Doppler Current Profiler (ADCP) and
multi-component data logger which collects information on water temperature and salinity,
as well as the concentration of Chlorophyll-a and dissolved organic matter. The USV has
been deployed to Lake Raleigh, Falls Lake, and the North Carolina coast. Initial sea trials
and validation have focused on the use of the seafloor-mapping package. Both the side-scan
and the bathymetric data collected by the USV have the capability to resolve sub-meter
features on the seabed or lake floor. Such high-resolution data will allow the USV to be
used for detailed habitat mapping, monitoring of coastal restoration efforts and geo-hazard
studies. The water-column mapping package will be used for environmental and water quality
studies along coasts and lakes throughout the southeastern United States.
NC State University Undergradute Research Symposium 2016.
Learn more



NC State University Undergradute Research Symposium 2016.
Learn more
Changes of subaqueous topography in shallow offshore water pose safety risks for embankments,
navigation, and ports. This study conducted measurements of subaqueous topography between
Datong and Xuliujing in the Yangtze River using a SeaBat 7125 multi-beam echo sounder, and the
channel change from 1998 to 2013 was calculated using historical bathymetry data. The study
revealed several important results: (1) the overall pattern of changes through the studied
stretch of the river was erosion–deposition–erosion. Erosion with a volume 700×10⁶ m³ occurred
in the upper reach, deposition of about 204×10⁶ m³ occurred in the middle reach, and erosion of
about 602×10⁶ m³ occurred in the lower reach. (2) Dunes are the most common microtopographic
feature, accounting for 64.3% of the Datong to Xuliujing reach, followed by erosional
topography and flat river topography, accounting for 27.6% and 6.6%, respectively. (3) Human
activities have a direct impact on the development of the microtopography. For instance, the
mining of sand formed holes on the surface of dunes with lengths of 20–35 m and depths of 3–5
m. We concluded that the overall trend of erosion (net erosion volume of 468×10⁶ m³) occurred
in the study area mainly because of the decreased sediment discharge following the closure of
the Three Gorges Dam. However, other human activities were also impact factors of topographic
change. Use of embankments and channel management reduced channel width, restricted river
meandering, and exacerbated the erosion phenomenon.
Science China Earth Science 61(7) · April 2018
Learn more
Science China Earth Science 61(7) · April 2018
Learn more
In this software project, the design and implementation of a modular Acoustic Doppler
Current Profiler (ADCP) parser is presented. The application was developed as a software
project for General Acoustics e.K. a company residing in Kiel, Germany. The reasons that
lead to this software project originated in a project in the Iraq. The decision to move the
ADCP data parsing location from the onshore server to an offshore platform required
the implementation of a platform independent parser. The goal was to create a flexible,
efficient, component based, and portable solution to parse ADCP data. The design of the
application should also allow later extension with new functionality. It was implemented
in modern C++11 using the Boost C++ libraries and a thread-based architecture.
SOFTWARE PROJECT – Communication Systems Group, Prof. Dr. Burkhard Stiller 2016
Learn more
SOFTWARE PROJECT – Communication Systems Group, Prof. Dr. Burkhard Stiller 2016
Learn more
The 2016 demonstration cruise of the MIDAS project was conducted to apply existing and novel
methods for habitat mapping in a real-world scenario to investigate their applicability to deep
sea mining scenarios. With the help of the excellent NIOZ RV Pelagia and their fantastic crew,
different image sampling strategies were conducted to better understand their feasibility and
practicality. All stations were conducted at Condor seamount off the coast of the island of
Faial (Azores, Portugal).
Learn more

Learn more
A pair of self-contained acoustic Doppler current profilers (SC-ADCPs) operating with different
frequencies were moored on a muddy sea bottom at about 20 m depth in the Bay of Vilaine off the
French Atlantic coast. With their acoustic beams oriented upwards, the SC-ADCPs ensonified most
of the water column. The results of several months of in situ recorded echo intensity data
spanning 2 years (2003 to 2004) from the dual-frequency ADCPs are presented in this paper. The
aim was to estimate suspended particle mass concentration and mean size. A concentration index
CI is proposed for the estimation of particle concentration. Based on theory the CI—unlike the
volume backscatter strength—does not depend on particle size. Compared with in situ optical
data, the CI shows reasonable precision but not increased with respect to that of the
highest-frequency backscatter strength. Concerning the mean particle size, despite a lack of
quantitative validation with optical particle-size measurements, the method yielded a
qualitative discrimination of mineral (small) and organic (large) particles. This supports the
potential of dual-frequency ADCPs to quantitatively determine particle size. A
cross-calibration of the transducers of each ADCP shows that a specific component of the
precision of the backscatter strength measured by ADCP depends on the acoustic frequency, the
cell thickness and the ensemble integration time. Based on these results, the use of two ADCPs
operating with distinctly different frequencies (two octaves apart) or a single dual-frequency
ADCP is recommended.
Learn more
Learn more
This summer research project aimed to achieve several distinct goals. The principal goal was to transform
the body of an Unmanned Surface Vessel (USV), specifically a Wave Adaptive Modular Vessel (WAMV),
into an autonomous mothership for a Remotely Operated Vehicle (ROV), the VideoRay Pro 4. Another
challenge addressed by the research team was finding a way to permanently mount an acoustic Doppler
Velocity Log (DVL) to the VideoRay without significantly hindering the VideoRay’s performance. Lastly,
the team was tasked with understanding how the DVL recorded data, and how that data could be used to
determine location. The Maritime Security Center Summer Research Institute ROV team, located at Stevens
Institute of Technology, conducted eight weeks of research to find solutions to these unique challenges.
 Maritime Security Center, A Department of Homeland
Security Science and Technology Center of Excellence, 2017.
Maritime Security Center, A Department of Homeland
Security Science and Technology Center of Excellence, 2017.
Learn more
Learn more
