ADCP Range Specifications
|
300kHz 3" Beams |
600kHz 3" Beams |
600kHz 2" Beams |
600kHz 1" Beams |
1200kHz 2" Beams |
|
|---|---|---|---|---|---|
| Bottom Track: | |||||
| Maximum Altitude | 300 m | 130 m | 120 m | 70 m | 50m |
| Minimum Altitude | 0.5 m | 0.3 m | 0.3 m | 0.3 m | 0.3 m |
| Current Profile: | |||||
| Broadband |
100 m @ 4m Bin Size |
50 m @ 2m Bin Size |
45 m @ 2m Bin Size |
40 m @ 2m Bin Size |
20 m @ 1m Bin Size |
| Narrowband |
150 m @ 4m Bin Size |
75 m @ 2m Bin Size |
70 m @ 2m Bin Size |
50 m @ 2m Bin Size |
30 m @ 1m Bin Size |
| Minimum Blanking Distance | 32.0 cm | 16.0 cm | 16.0 cm | 16.0 cm | 8.0 cm |
| Minimum Bin Size | 2.8 cm | 1.4 cm | 1.4 cm | 1.4 cm | 0.7 cm | Specifications may be subject to change at any time in the future |
ADCP Specifications
|
300kHz 3" Beams |
600kHz 3" Beams |
600kHz 2" Beams |
600kHz 1" Beams |
1200kHz 2" Beams |
|
|---|---|---|---|---|---|
| Water Profile: | |||||
| Broadband |
100 m @ 4m Bin Size |
50 m @ 2m Bin Size |
45 m @ 2m Bin Size |
40 m @ 2m Bin Size |
20 m @ 1m Bin Size |
| Narrowband |
150 m @ 4m Bin Size |
75 m @ 2m Bin Size |
70 m @ 2m Bin Size |
50 m @ 2m Bin Size |
30 m @ 1m Bin Size |
| Minimum Blanking Distance | 32.0 cm | 16.0 cm | 16.0 cm | 16.0 cm | 8.0 cm |
| Minimum Bin Size | 2.8 cm | 1.4 cm | 1.4 cm | 1.4 cm | 0.7 cm |
| Maximum Number of Bins | 200 bins | 200 bins | 200 bins | 200 bins | 200 bins |
| Velocity Resolution | 0.01 cm/s | 0.01 cm/s | 0.01 cm/s | 0.01 cm/s | 0.01 cm/s |
| Long-Term Accuracy |
± 0.25% ± 2 mm/s |
± 0.25% ± 2 mm/s |
± 0.25% ± 2 mm/s |
± 0.50% ± 1.5 mm/s |
± 0.25% ± 2 mm/s |
| BB Single Ping Precision |
3.5 cm/s @ 4m bin size |
3.5 cm/s @ 2m bin size |
3.5 cm/s @ 2m bin size |
3.5 cm/s @ 2m bin size |
3.5 cm/s @ 1m bin size |
| NB Single Ping Precision |
20.0 cm/s @ 4m bin size |
20.0 cm/s @ 2m bin size |
20.0 cm/s @ 2m bin size |
20.0 cm/s @ 2m bin size |
20.0 cm/s @ 1m bin size |
| Velocity Range | ±5.0 m/s (Default); ±20.0 m/s (Maximum) | ±5.0 m/s (Default); ±20.0 m/s (Maximum) | ±5.0 m/s (Default); ±20.0 m/s (Maximum) | ±10.0 m/s (Default); ±20.0 m/s (Maximum) | ±5.0 m/s (Default); ±20.0 m/s (Maximum) |
| Amplitude Dynamic Range | 100 dB | 100 dB | 100 dB | 100 dB | 100 dB |
| Amplitude Presicion | 0.001 dB | 0.001 dB | 0.001 dB | 0.001 dB | 0.001 dB |
| Bottom Track: | |||||
| Minimum Altitude | 0.5 m | 0.3 m | 0.3 m | 0.3 m | 0.3 m |
| Maximum Altitude | 300 m | 130 m | 120 m | 70 m | 50m |
| Long-Term Accuracy |
± 0.70% ± 2 mm/s |
± 0.25% ± 2 mm/s |
± 0.50% ± 2 mm/s |
± 0.50% ± 1.5 mm/s |
± 0.25% ± 2 mm/s |
| Single Ping Precision |
0.6 cm/s @ 3 m/s |
0.5 cm/s @ 3 m/s |
0.5 cm/s @ 3 m/s |
1.5 cm/s @ 1.0 m/s |
0.4 cm/s @ 3 m/s |
| Data: | |||||
| Communcations | [RS-232 & RS-485], [RS-422], [Ethernet (UDP)] | ||||
| Ping Rate | Up to 10 hz | Up to 10 hz | Up to 10 hz | Up to 10 hz | Up to 10 hz |
| Internal Recording | 32 GB Micro SD Card | ||||
| Data Formats | RTB, RTD, PD0, PD3, PD4, PD5, PD6, PD13, MATLAB, CSV, Python | ||||
| Sensors: | |||||
| Compass | Range: 0°-360°, Accuracy: 1° RMS, Resolution: 0.01° | ||||
| Pitch/Roll | Range: Roll ±180° | Pitch ±90°, Accuracy: < 1° RMS, Resolution: 0.01° | ||||
| Water Temp | Range: -5° - 70°C, Accuracy: ±0.15°C | ||||
| Pressure | Range: Selectable, Accuracy: ±0.1% Range | ||||
| System: | |||||
| Transducer Size | 3 in | 3 in | 2 in | 1 in | 2 in |
| Configurations | 4-Beam, 5-Beam, 7-Beam, 8-Beam | ||||
| Beam Width | 2.80° | 1.42° | 2.16° | 3.50° | 1.01° |
| Beam Angle | 20° | 20° | 20° | 20° | 20° |
| Voltage Range | 12 - 36 Volt DC | ||||
| Average Power | 23 W | 30 W | 30 W | 30 W | 23 W |
| Temperature | -5° to 45° C (Operating), -30° to 60° C (Storage) | ||||
| Depth Rating | 300m, 3000m, 4000m, 6000m | ||||
| Material Options | Acetal(Plastic), Aluminum, Titanium | ||||
| Specifications may be subject to change at any time in the future | |||||
ADCP Beam Selection Helper
Quote Request
An Doppler Velocity Logger (speed) is an instrument used to measure high precision underwater navigation and positioning. The frequency of the ADCP will determine the maximum range in Bottom Tracking and Current Profiling. All of our ADCP will come with both Bottom Track and Current Profiling functionality. Bottom Track is used to measure the speed and direction of the vessel. Current profiling is used to measure the speed and direction of the water. Bottom Track also includes the depth of the water for bathymetry and surveying. Our DVLs come in all shapes and sizes. With our OEM, you can also design your own custom shape or size.
Internally all of our DVLs come with the same features and the same electronics.
The only options you need to determine are:
SeaPILOT Enclosures Available
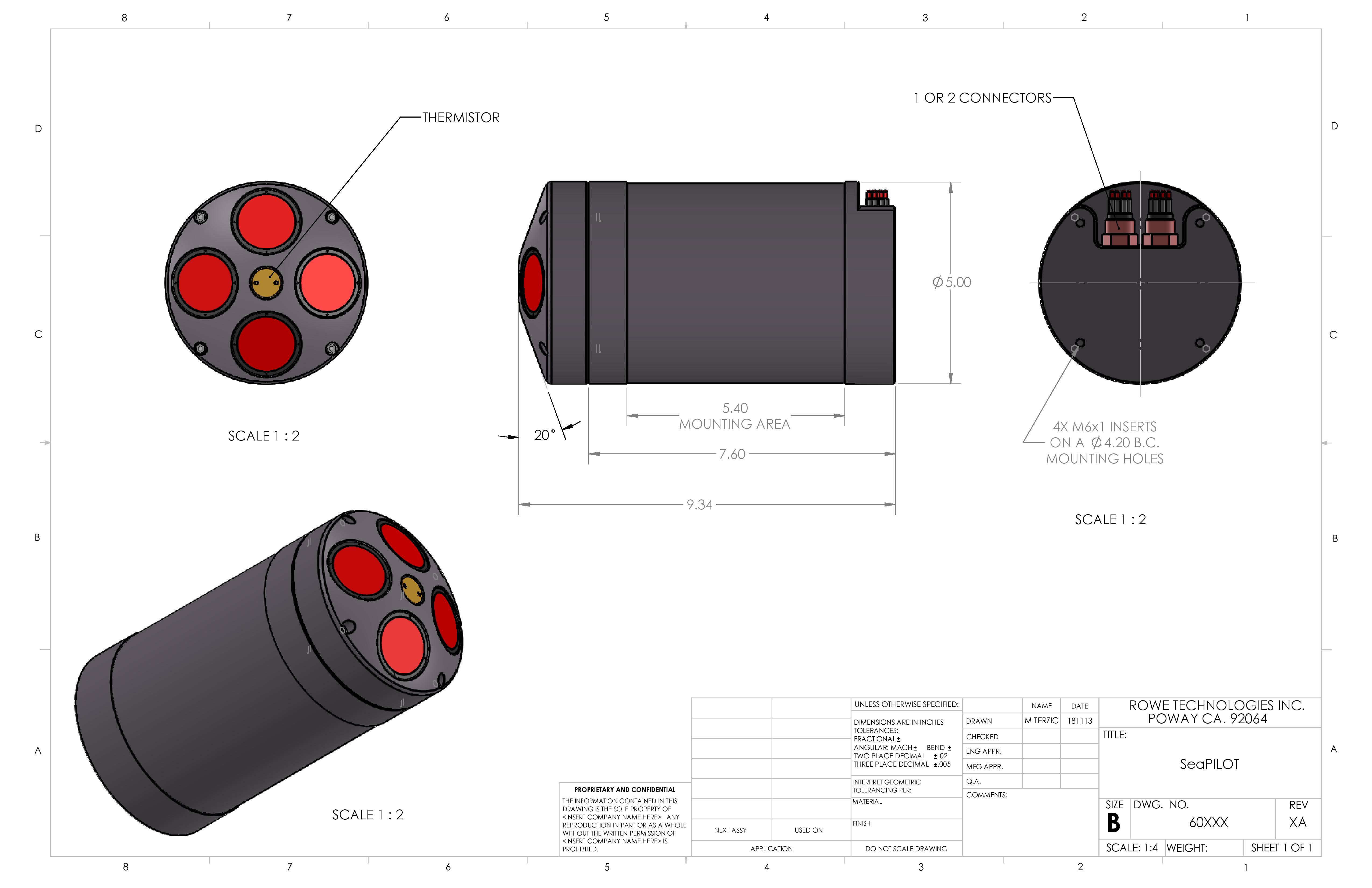
Capsule
Smallest Package:5.0in x 9.3in (OD x Height)
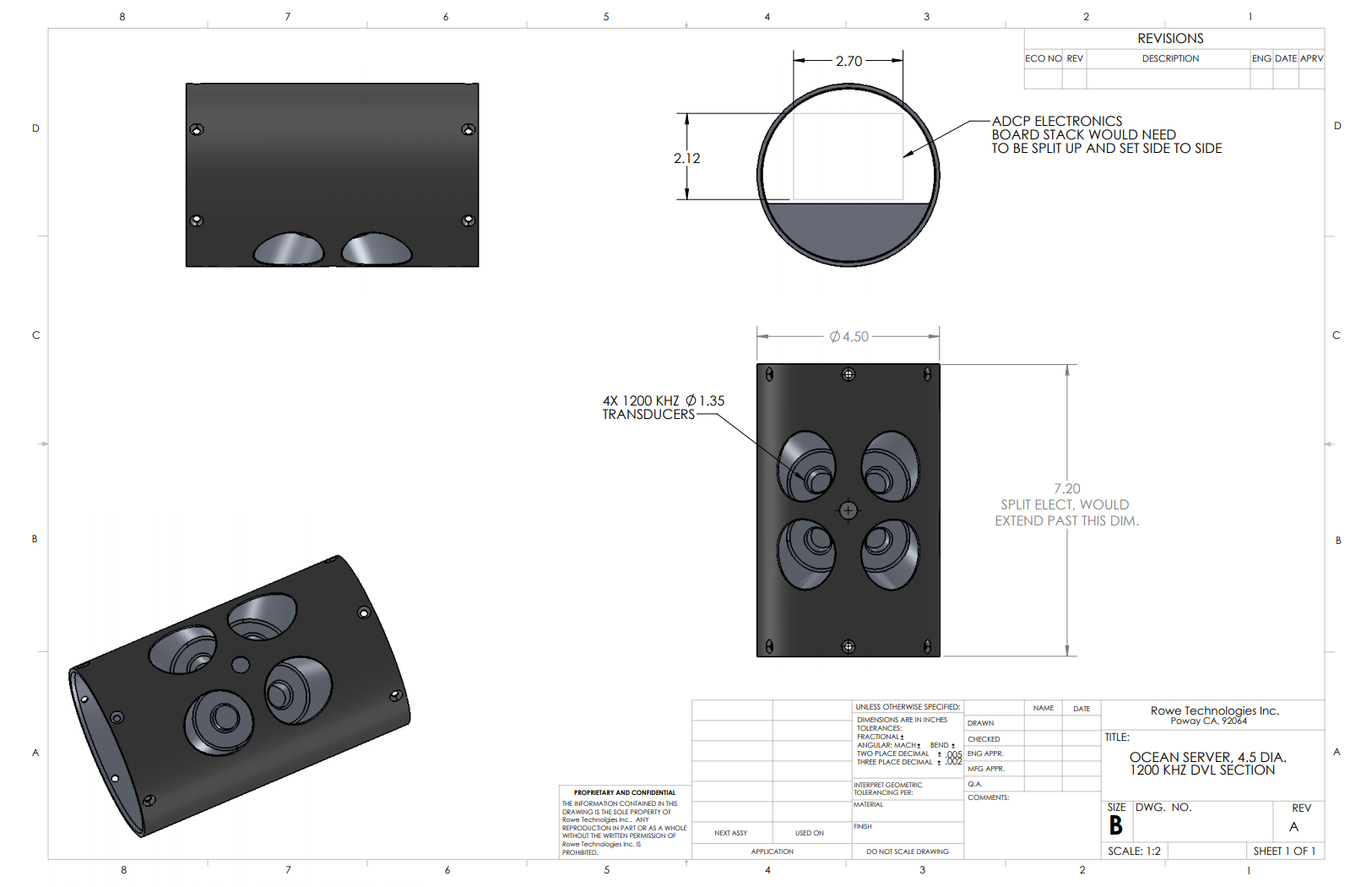
Cylindrical
Smallest Package:4.5in x 12.5in (OD x Length)
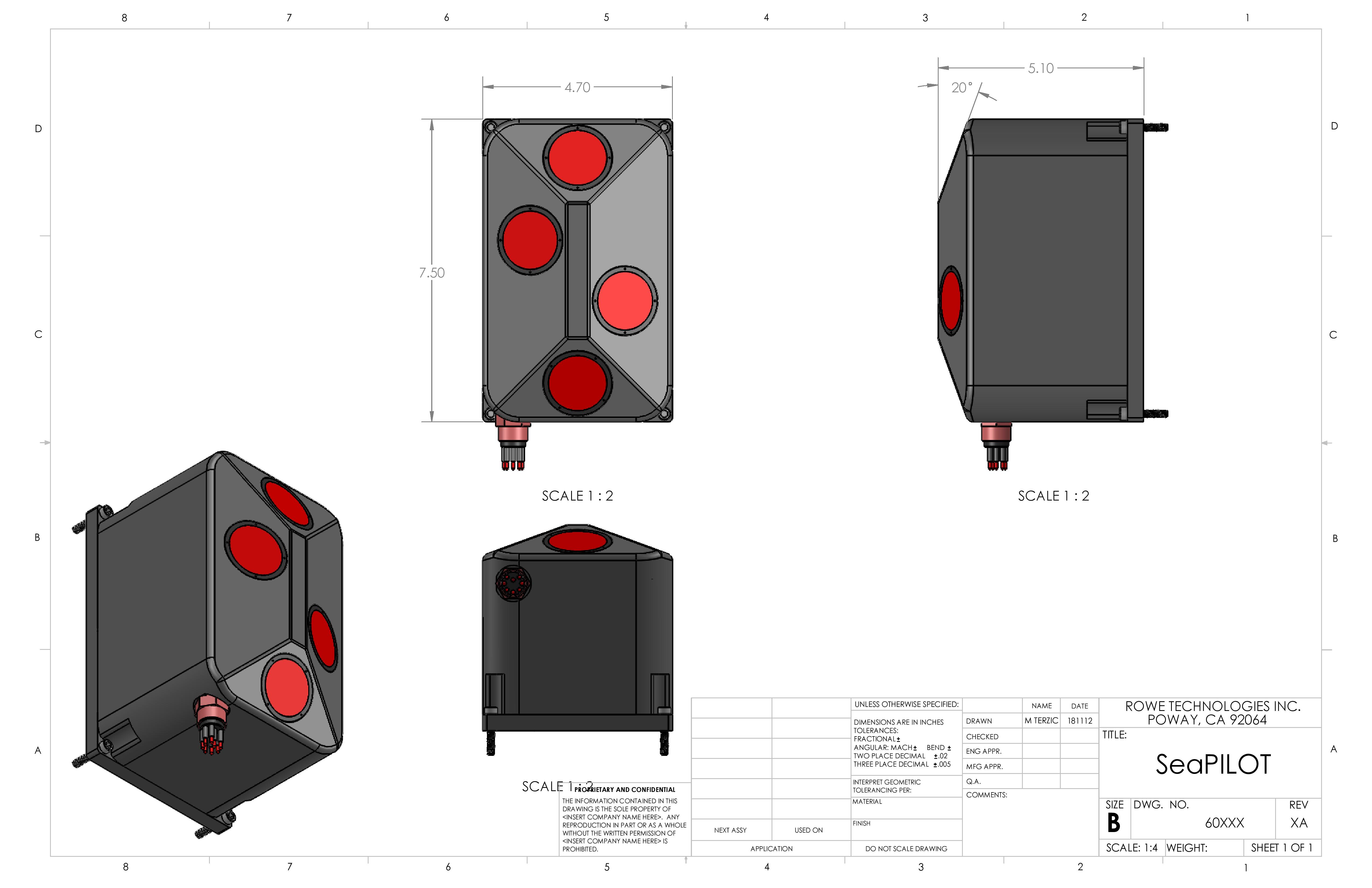
Flat-Pack
Smallest Package:5.0in x 7.5in x 5.1in (LxWxH)
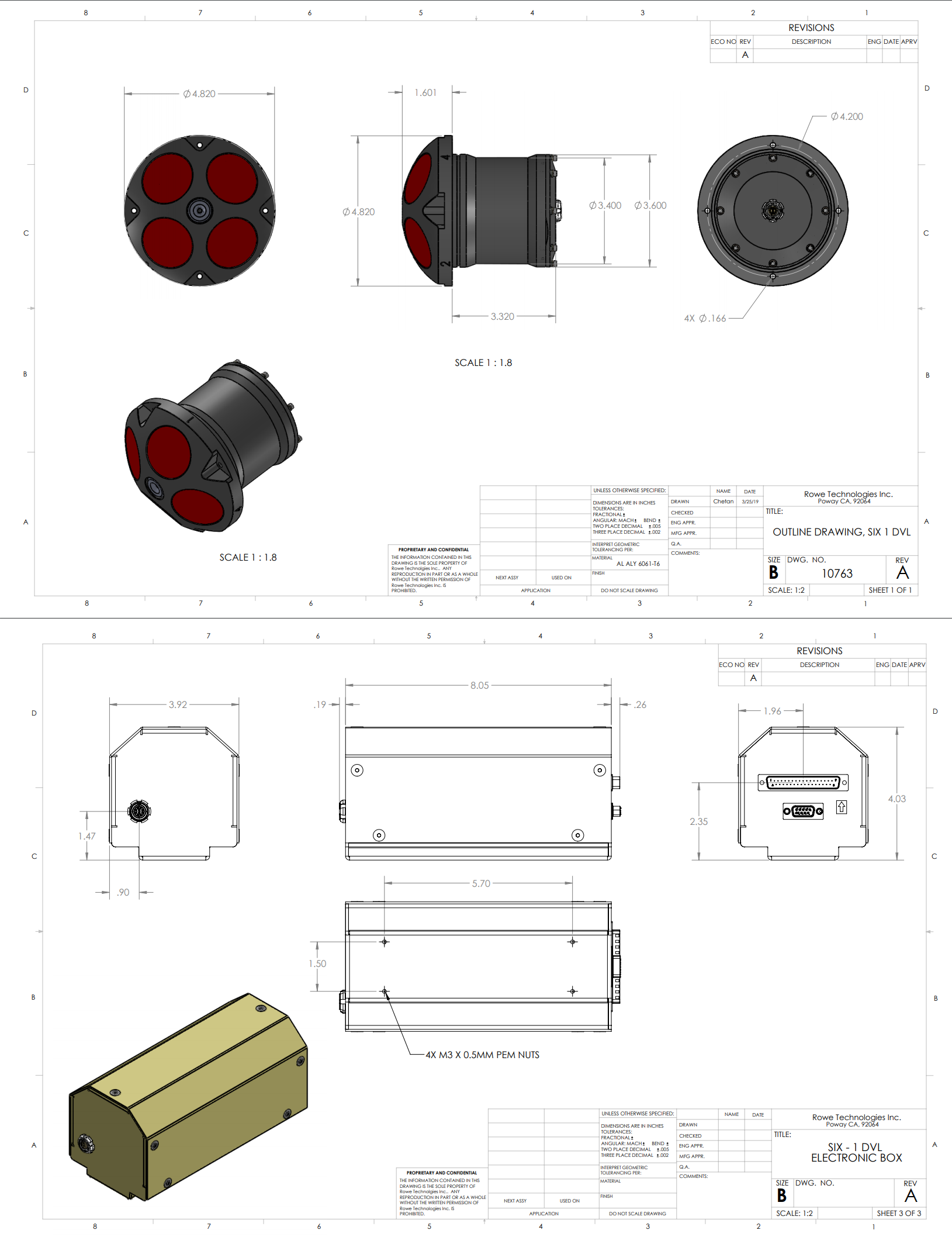
Remote Head
Head: 4.82in x 4.92in (OD x Height)Electronics: 8.05in x 3.92in x 4.03in (LxWxH)
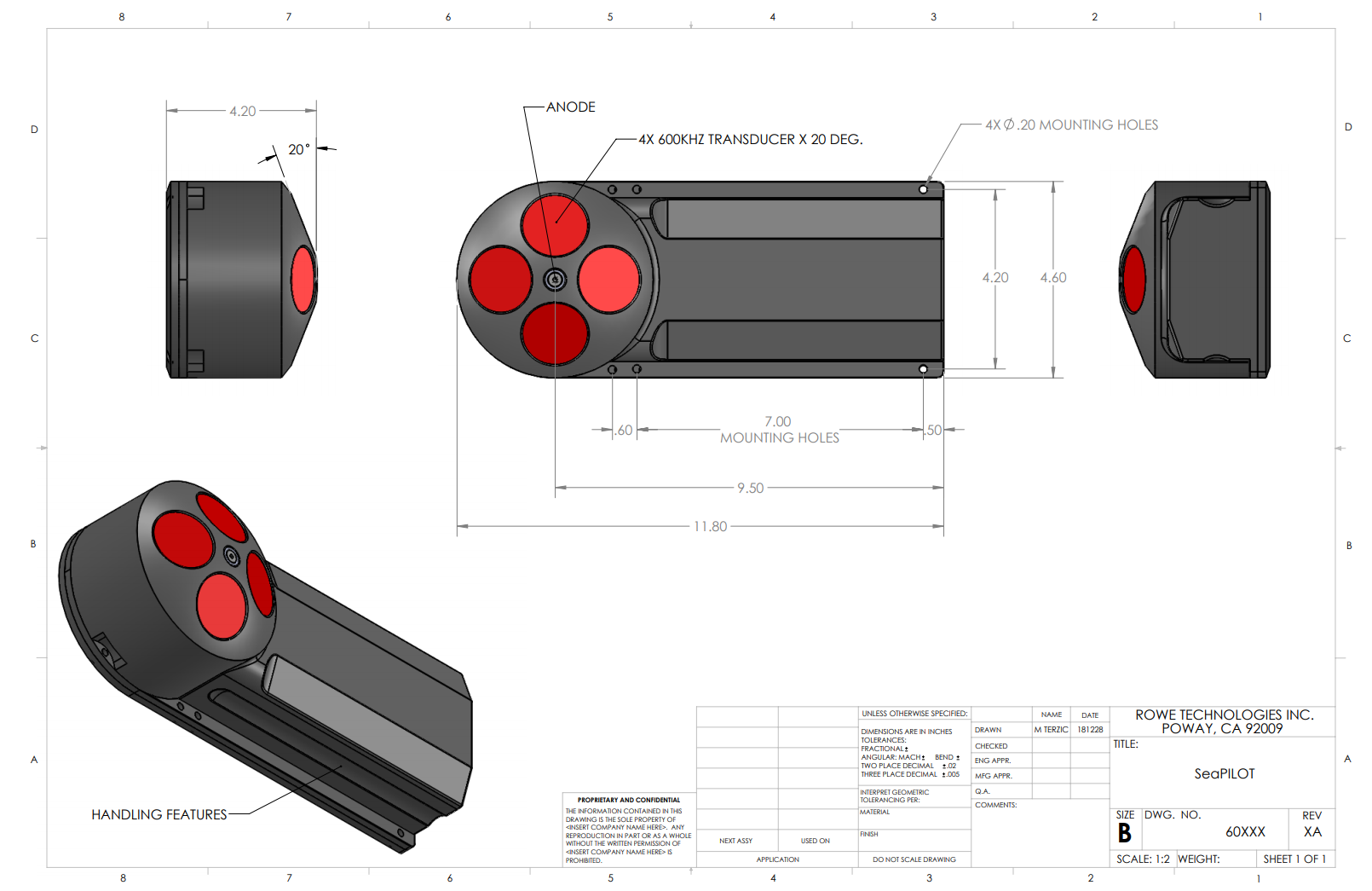
Low Profile
11.8in x 4.6in x 4.2in (LxWxH)
Doppler Velocity Logger (DVL) for underwater navigation on ROV, AUV and Vessels